5月23日上午10:00,在辅导员谢超老师的组织下,2023级全体研究生齐聚8D-101教室参加了2024年第11期研究生论坛,本次论坛共有5位2022级研究生分享了他们在“机械与机器人专题”方面的研究成果,论坛由祁婷老师进行点评,由年级长徐彬主持。


李洋同学分享了他的研究课题“重卡驾驶室液压翻转系统阻尼性能分析及优化研究”。其研究内容是悬置状态与翻转状态工作差异,重卡驾驶室液压翻转系统阻尼性能分析,通过示功图分析来观察系统工作中是否出现异常以及得出系统加力及加力刚度。
张蒂同学分享了他的研究课题“衍架式碳纤维复合材料编制成型设备的研究”,其研究的内容主要是衍架式碳纤维复合材料编织成型工艺,将碳纤维丝束浸润树脂后以骨架做支撑,通过成型设备编织形成衍架式结构,通常涉及开发用于制造衍架式碳纤维复合材料的成型设备。
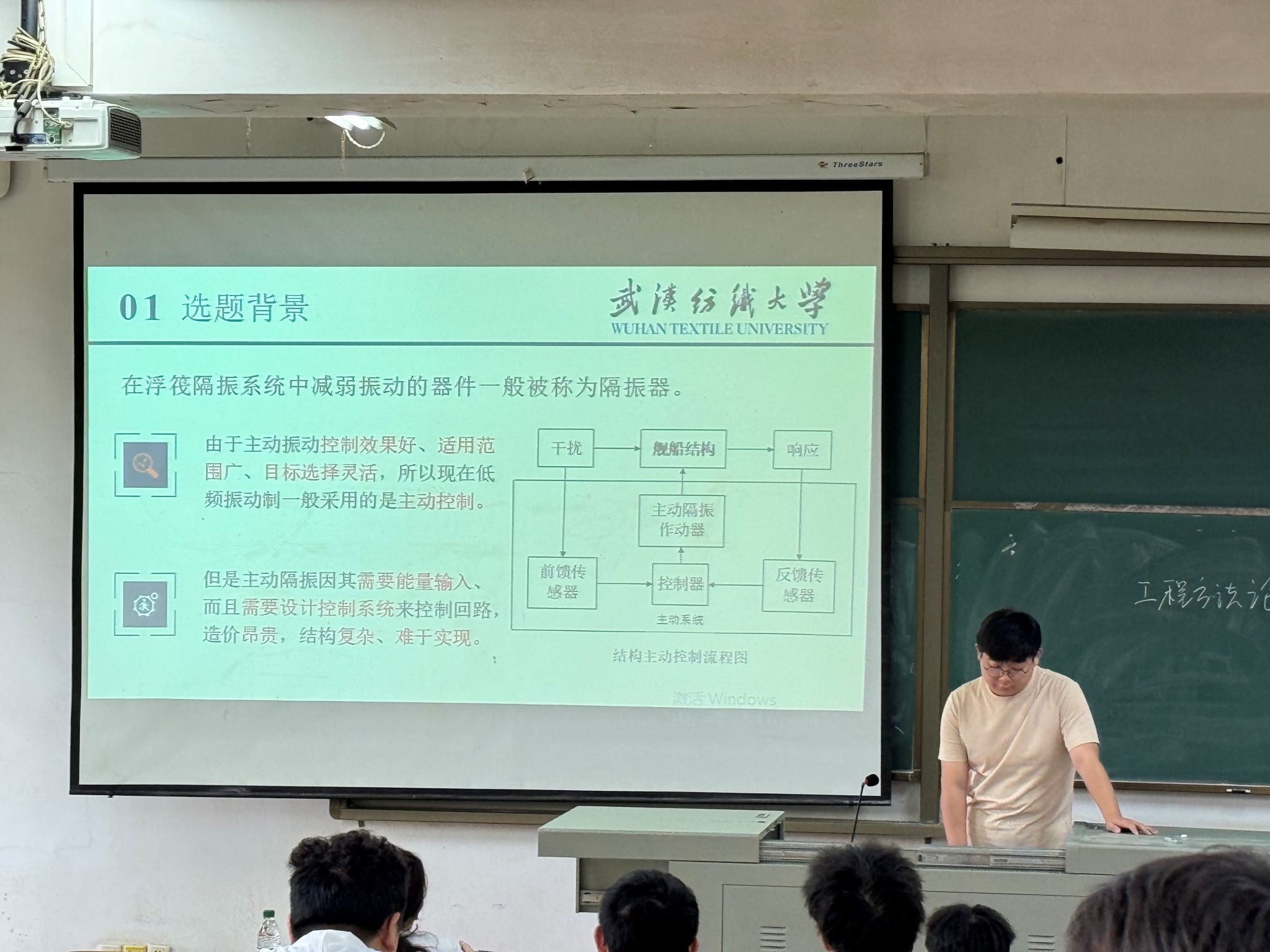
卢国盛同学分享了他的课题“高静低动隔振器在浮筏隔振系统中的设计研究”,其研究的内容是通常涉及开发用于浮筏隔振系统的高效隔振器。这种研究通常包括对高静低动隔振器的设计、制造和测试,以确保其在浮筏隔振系统中能够有效地减少静态和动态振动传递。这种研究还可能涉及对隔振器材料特性的测试和分析,以确定最佳的设计参数和工艺,以及对隔振系统整体性能进行评估和改进。
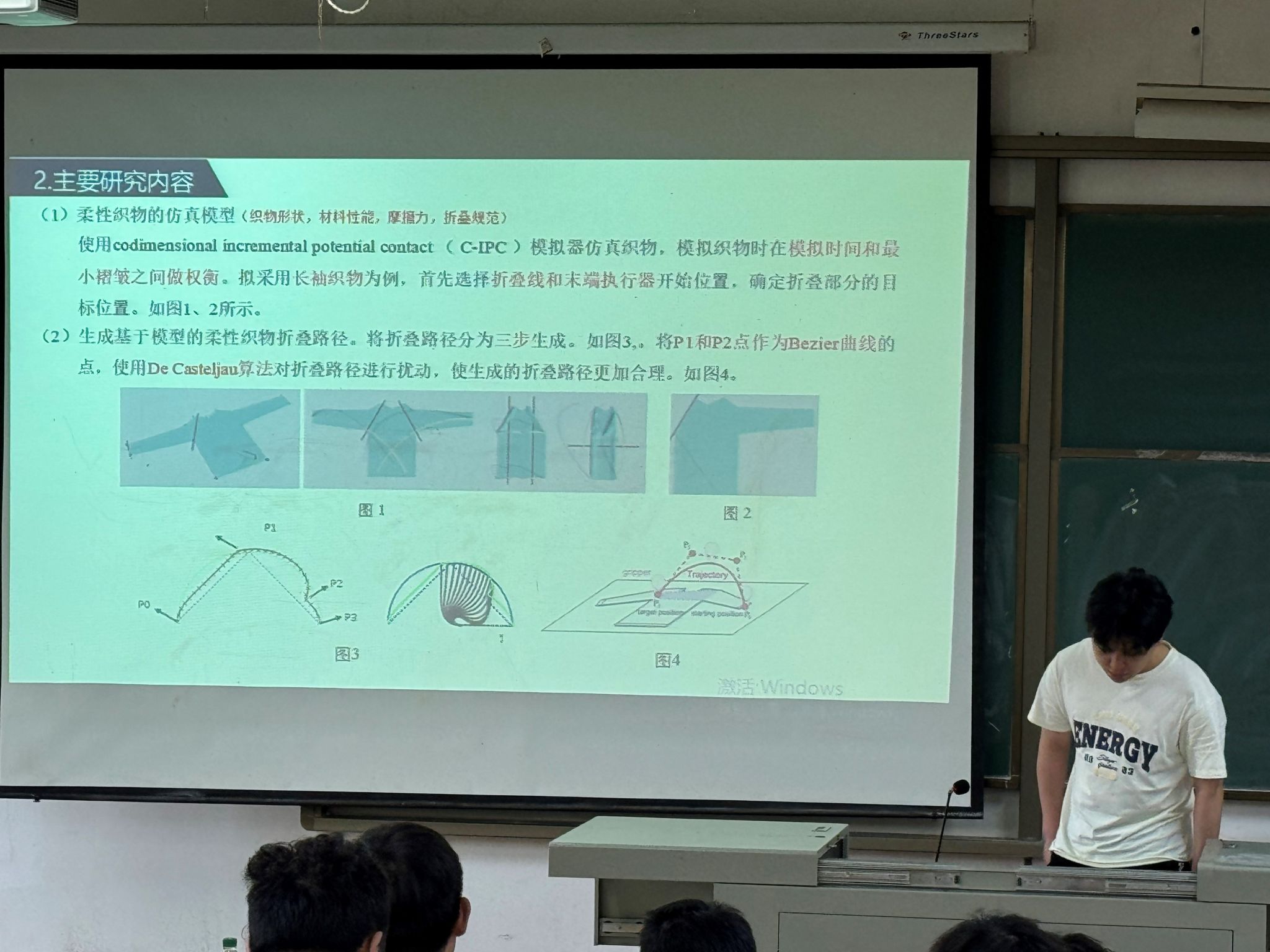
王帅同学分享了他的课题“基于UR5机械臂柔性织物折叠的轨迹规划研究”,其研究的课题内容是通过有限元的方法获得结构的点到点导纳矩阵,进而计算结构的原点阻抗,筏架的原点阻抗由于结构对称,基础上与隔振器连接处4个点的原点阻抗相同,因此在低于第1阶模态频率(78.30Hz)时候,筏架的阻抗表现为质量阻抗。
周迁同学分享了他的课题“面向人机共融的织造车间物流机器人路径规划与跟踪控制研究”,其研究内容是研究如何利用机器人路径规划算法来优化织造车间内物流的路径选择,以提高效率和安全性。设计机器人的运动控制策略,确保其能够精确地跟随预定路径,并在需要时适应环境变化或人员活动。研究机器人与人员共同工作时的交互效果,包括安全性、效率和人机协作的优化。
最后,祁婷老师指出本次研究生论坛展示了多个领域的研究成果,同学们的研究前景值得期待,注重有效评估和改进,注重合理规划和精益求精,为未来科学工程的发展分享了自己的思想和解决方案。
